Note
This tutorial can be used interactively with Google Colab! You can also click here to run the Jupyter notebook locally.

Compile YOLO-V2 and YOLO-V3 in DarkNet Models¶
Author: Siju Samuel
This article is an introductory tutorial to deploy darknet models with TVM. All the required models and libraries will be downloaded from the internet by the script. This script runs the YOLO-V2 and YOLO-V3 Model with the bounding boxes Darknet parsing have dependancy with CFFI and CV2 library Please install CFFI and CV2 before executing this script
pip install cffi opencv-python
# numpy and matplotlib
import numpy as np
import matplotlib.pyplot as plt
import sys
# tvm, relay
import tvm
from tvm import te
from tvm import relay
from ctypes import *
from tvm.contrib.download import download_testdata
from tvm.relay.testing.darknet import __darknetffi__
import tvm.relay.testing.yolo_detection
import tvm.relay.testing.darknet
Choose the model¶
Models are: ‘yolov2’, ‘yolov3’ or ‘yolov3-tiny’
# Model name
MODEL_NAME = "yolov3"
Download required files¶
Download cfg and weights file if first time.
CFG_NAME = MODEL_NAME + ".cfg"
WEIGHTS_NAME = MODEL_NAME + ".weights"
REPO_URL = "https://github.com/dmlc/web-data/blob/main/darknet/"
CFG_URL = REPO_URL + "cfg/" + CFG_NAME + "?raw=true"
WEIGHTS_URL = "https://pjreddie.com/media/files/" + WEIGHTS_NAME
cfg_path = download_testdata(CFG_URL, CFG_NAME, module="darknet")
weights_path = download_testdata(WEIGHTS_URL, WEIGHTS_NAME, module="darknet")
# Download and Load darknet library
if sys.platform in ["linux", "linux2"]:
DARKNET_LIB = "libdarknet2.0.so"
DARKNET_URL = REPO_URL + "lib/" + DARKNET_LIB + "?raw=true"
elif sys.platform == "darwin":
DARKNET_LIB = "libdarknet_mac2.0.so"
DARKNET_URL = REPO_URL + "lib_osx/" + DARKNET_LIB + "?raw=true"
else:
err = "Darknet lib is not supported on {} platform".format(sys.platform)
raise NotImplementedError(err)
lib_path = download_testdata(DARKNET_URL, DARKNET_LIB, module="darknet")
DARKNET_LIB = __darknetffi__.dlopen(lib_path)
net = DARKNET_LIB.load_network(cfg_path.encode("utf-8"), weights_path.encode("utf-8"), 0)
dtype = "float32"
batch_size = 1
data = np.empty([batch_size, net.c, net.h, net.w], dtype)
shape_dict = {"data": data.shape}
print("Converting darknet to relay functions...")
mod, params = relay.frontend.from_darknet(net, dtype=dtype, shape=data.shape)
Converting darknet to relay functions...
Import the graph to Relay¶
compile the model
target = tvm.target.Target("llvm", host="llvm")
dev = tvm.cpu(0)
data = np.empty([batch_size, net.c, net.h, net.w], dtype)
shape = {"data": data.shape}
print("Compiling the model...")
with tvm.transform.PassContext(opt_level=3):
lib = relay.build(mod, target=target, params=params)
[neth, netw] = shape["data"][2:] # Current image shape is 608x608
Compiling the model...
Load a test image¶
test_image = "dog.jpg"
print("Loading the test image...")
img_url = REPO_URL + "data/" + test_image + "?raw=true"
img_path = download_testdata(img_url, test_image, "data")
data = tvm.relay.testing.darknet.load_image(img_path, netw, neth)
Loading the test image...
Execute on TVM Runtime¶
The process is no different from other examples.
from tvm.contrib import graph_executor
m = graph_executor.GraphModule(lib["default"](dev))
# set inputs
m.set_input("data", tvm.nd.array(data.astype(dtype)))
# execute
print("Running the test image...")
# detection
# thresholds
thresh = 0.5
nms_thresh = 0.45
m.run()
# get outputs
tvm_out = []
if MODEL_NAME == "yolov2":
layer_out = {}
layer_out["type"] = "Region"
# Get the region layer attributes (n, out_c, out_h, out_w, classes, coords, background)
layer_attr = m.get_output(2).numpy()
layer_out["biases"] = m.get_output(1).numpy()
out_shape = (layer_attr[0], layer_attr[1] // layer_attr[0], layer_attr[2], layer_attr[3])
layer_out["output"] = m.get_output(0).numpy().reshape(out_shape)
layer_out["classes"] = layer_attr[4]
layer_out["coords"] = layer_attr[5]
layer_out["background"] = layer_attr[6]
tvm_out.append(layer_out)
elif MODEL_NAME == "yolov3":
for i in range(3):
layer_out = {}
layer_out["type"] = "Yolo"
# Get the yolo layer attributes (n, out_c, out_h, out_w, classes, total)
layer_attr = m.get_output(i * 4 + 3).numpy()
layer_out["biases"] = m.get_output(i * 4 + 2).numpy()
layer_out["mask"] = m.get_output(i * 4 + 1).numpy()
out_shape = (layer_attr[0], layer_attr[1] // layer_attr[0], layer_attr[2], layer_attr[3])
layer_out["output"] = m.get_output(i * 4).numpy().reshape(out_shape)
layer_out["classes"] = layer_attr[4]
tvm_out.append(layer_out)
elif MODEL_NAME == "yolov3-tiny":
for i in range(2):
layer_out = {}
layer_out["type"] = "Yolo"
# Get the yolo layer attributes (n, out_c, out_h, out_w, classes, total)
layer_attr = m.get_output(i * 4 + 3).numpy()
layer_out["biases"] = m.get_output(i * 4 + 2).numpy()
layer_out["mask"] = m.get_output(i * 4 + 1).numpy()
out_shape = (layer_attr[0], layer_attr[1] // layer_attr[0], layer_attr[2], layer_attr[3])
layer_out["output"] = m.get_output(i * 4).numpy().reshape(out_shape)
layer_out["classes"] = layer_attr[4]
tvm_out.append(layer_out)
thresh = 0.560
# do the detection and bring up the bounding boxes
img = tvm.relay.testing.darknet.load_image_color(img_path)
_, im_h, im_w = img.shape
dets = tvm.relay.testing.yolo_detection.fill_network_boxes(
(netw, neth), (im_w, im_h), thresh, 1, tvm_out
)
last_layer = net.layers[net.n - 1]
tvm.relay.testing.yolo_detection.do_nms_sort(dets, last_layer.classes, nms_thresh)
coco_name = "coco.names"
coco_url = REPO_URL + "data/" + coco_name + "?raw=true"
font_name = "arial.ttf"
font_url = REPO_URL + "data/" + font_name + "?raw=true"
coco_path = download_testdata(coco_url, coco_name, module="data")
font_path = download_testdata(font_url, font_name, module="data")
with open(coco_path) as f:
content = f.readlines()
names = [x.strip() for x in content]
tvm.relay.testing.yolo_detection.show_detections(img, dets, thresh, names, last_layer.classes)
tvm.relay.testing.yolo_detection.draw_detections(
font_path, img, dets, thresh, names, last_layer.classes
)
plt.imshow(img.transpose(1, 2, 0))
plt.show()
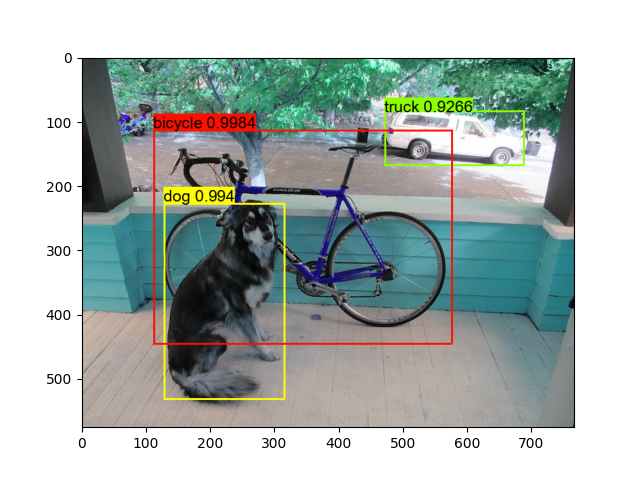
Running the test image...
class:['dog 0.994'] left:127 top:227 right:316 bottom:533
class:['truck 0.9266'] left:471 top:83 right:689 bottom:169
class:['bicycle 0.9984'] left:111 top:113 right:577 bottom:447
Total running time of the script: ( 1 minutes 15.692 seconds)